Forums » GAMMA Processing » DEM generation »
The .ls_map files are in different geometry generated by gc_map and gc_map2 respectively
Added by Cynthia Chen about 4 years ago
Dear all,
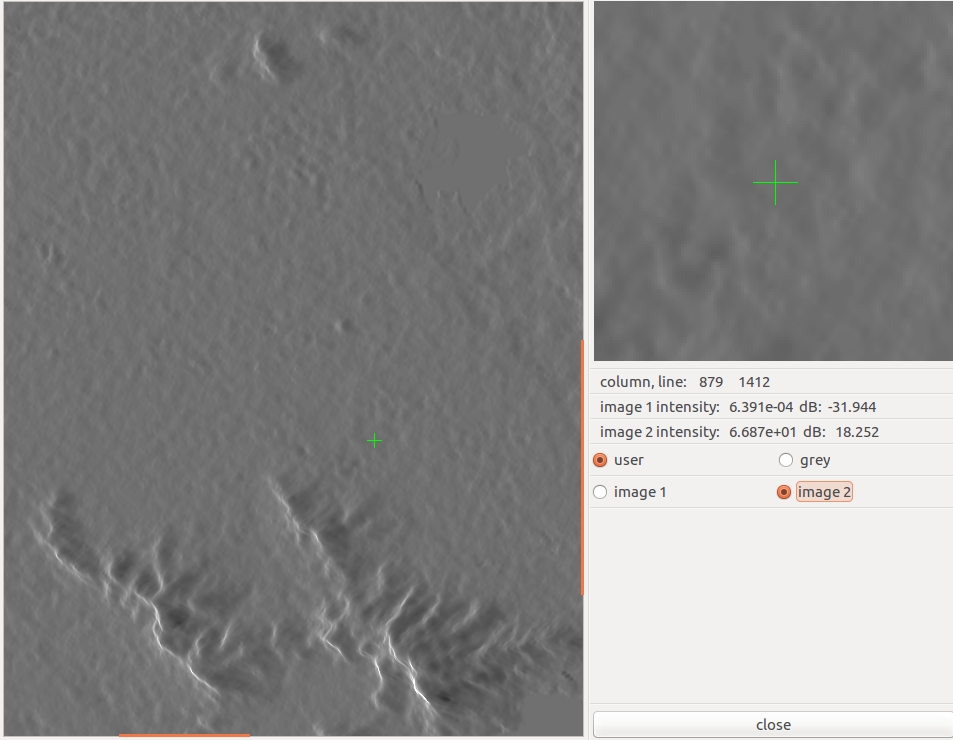
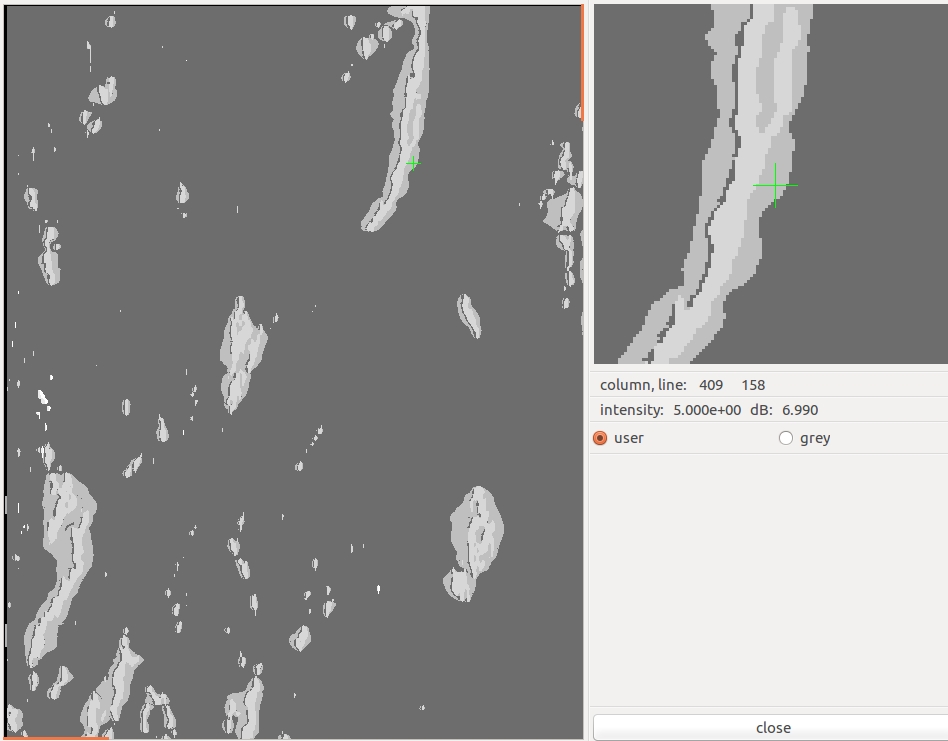
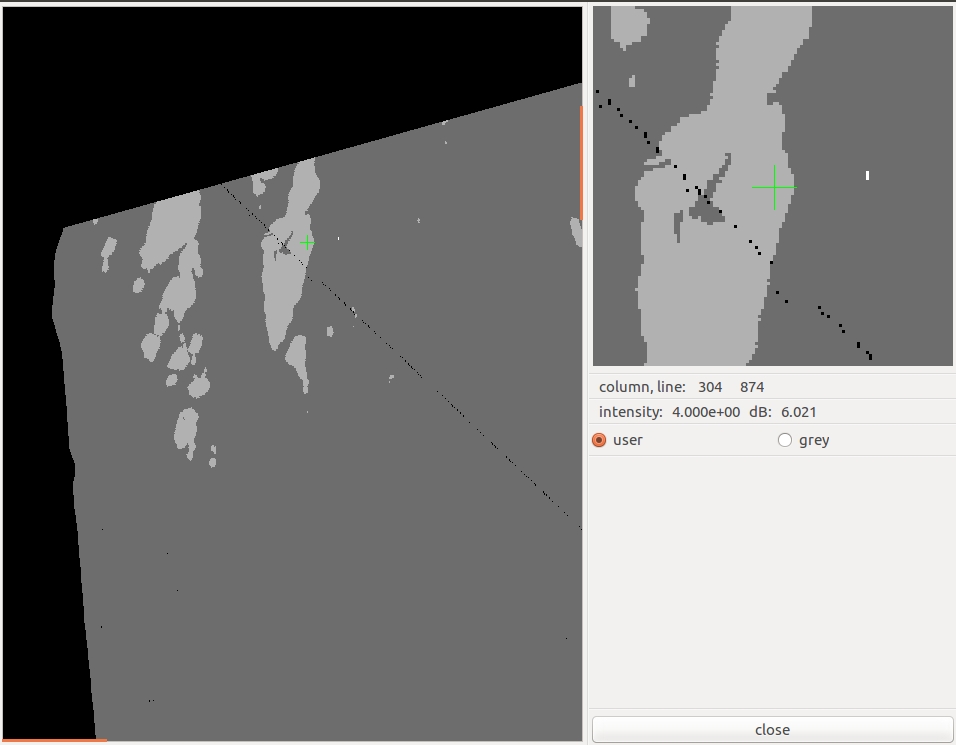
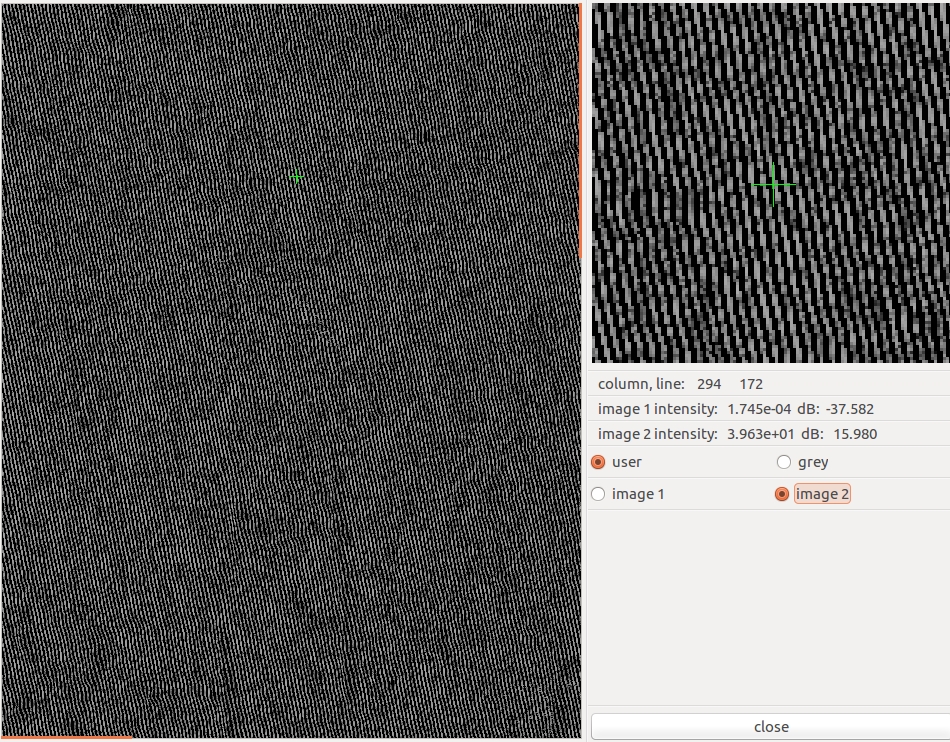
I tried gc_map and gc_map2, finding that the two .ls_map files are in different geometry generated by gc_map and gc_map2, respectively. (see the attached files)
I read the related html documents. ls_map genarated by gc_map2 is in original DEM geometry, and ls_map genarated by gc_map is in original map projection. I thought these two are the same geometry. I am very confused now.
I am urgent to get correct ls_map file, to carry the next step: pixel_area. Using the result of gc_map2 makes the pix_gamma0, which is the result of pixel_area, wrong (see the attached files).
Best regards,
Helen
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Replies (3)
The .ls_map files are in different geometry generated by gc_map and gc_map2 respectively - Added by Charles Werner about 4 years ago
Dear Helen,
gc_map has been superseded by gc_map2 and should not be used.
The layover-shadow map was not accurate produced by gc_map was not accurate
because it assumed the satellite track was running North South. For this reason,
among others, gc_map2 was developed. Therefore please use the ls_map generated
by gc_map2 in pixel_area.
To be clear, Map or DEM geometry mean the same thing; the geometry defined by
the DEM_par file.
the latest version of pixel area also has as output the pixel area normalized
sigma0.
I recommend that you use the current software version.
- Calculate terrain-based sigma0 and gamma0 normalization area in slant-range
geometry *** - Copyright 2020, Gamma Remote Sensing, v2.8 19-Nov-2020 of/clw/uw/cm ***
usage: pixel_area <MLI_par> <DEM_par> <DEM> <lookup_table> <ls_map> <inc_map>
<pix_sigma0> [pix_gamma0] [nstep] [area_fact] [sigma0_ratio] [gamma0_ratio]
[sig2gam_ratio]
input parameters:
MLI_par (input) ISP MLI or SLC image parameter file (slant-range geometry)
DEM_par (input) DEM/MAP parameter file
DEM (input) DEM data file (or constant height value)
lookup_table (input) geocoding lookup table (FCOMPLEX)
ls_map (input) layover and shadow map in map geometry
inc_map (input) local incidence angle map in map geometry (enter - for
none)
NOTE: required for calculation of pix_gamma0, gamma0_ratio, and
sig2gam_ratio
pix_sigma0 (output) sigma0 normalization area (enter - for none)
pix_gamma0 (output) gamma0 normalization area (enter - for none)
nstep number of steps to divide each dimension of the map pixels
(default: 16)
area_fact area factor that is multiplied with the rg/az pixel size to set
a lower
threshold for the minimal pixel area that is accepted (enter -
for default: 1.00)
sigma0_ratio (output) ratio between ellipsoid and DEM-based sigma0
normalization areas (enter - for none)
gamma0_ratio (output) ratio between ellipsoid and DEM-based gamma0
normalization areas (enter - for none)
sig2gam_ratio (output) ratio of ellipsoid sigma0 and DEM-based gamma0
normalization areas (enter - for none)
Best regards,
Charles
RE: The .ls_map files are in different geometry generated by gc_map and gc_map2 respectively - Added by Cynthia Chen about 4 years ago
Dear Charles,
Thank you for your reply. It's very helpful. Unfortunately, our laboratory only has GAMMA-201710, which means that I don't have a latest version of pixel_area. Could you please help me with the pixel_area problem. Thank you so much.
Best regards,
Helen
RE: The .ls_map files are in different geometry generated by gc_map and gc_map2 respectively - Added by Charles Werner about 4 years ago
Hello Helen,
Just use gc_map2. there is probably an error in how you are processing the data.
The layover-shadow map should follow features in your DEM segment. If they do
not, then there is an error
somewhere. The layover-shadow map has the same dimensions as the DEM
I might suggest that you try using the script mk_geo_radcal2 that can take you
step by step through the process of terrain geocoding. This script is in the
$DIFF_HOME/scripts directory. There is also html documentation for it. Though
2017 is quite a while ago, I think it should be there. To get further support
from us, you should get the most recent software version.
Best regards,
Charles Werner